“驾驶台,后甲板准备完毕。”
“驾驶台收到,船艉受风,可以开始作业。”
“后甲板收到,无人艇作业开始。起吊!”
伴随着对讲机中传出的操作指令,“嘉庚”号在西北太平洋副热带逆流区涡旋观测航次(航次编号:KK2410)中的无人艇作业任务正式开始。重达1.5吨的无人艇在艉甲板上由A架吊起,并缓缓布放入水。无人艇入水后,便与“嘉庚”号分离,按程序中设定的路线完成一系列海洋观测调查任务。

姜若桐 摄
七小时后,完成任务的无人艇在预定海域与“嘉庚”号成功汇合,并被安全回收。这是“嘉庚”号与无人艇首次完成海上科考分区协同实时作业,也为打造以“嘉庚”号为母船的下一代无人化科考船队奠定了坚实的基础。

姜若桐 摄
亮点一:船艉A架挂网布放回收无人艇
不同于后期新建的科考船,“嘉庚”号在建造之初就为无人船的布放与回收预留了相应的功能接口与扩展空间。在经前期调研、码头试验和海上比较测试后,本航次采用“船艉A架挂网”方式对无人艇进行布放和回收,同时也进一步验证了该方案在无人艇布放回收中的安全性和高效性。

姜若桐 摄
亮点二:“嘉庚”号完成首次母子船协同作业
本航次中,无人艇在1.5-2m浪高的海况下,使用随船搭载的WHM600K型声学多普勒海流计和SBE-37型CTD,采集了海流剖面数据(分辨率1米1层,观测深度50m)和表层温度、盐度、压力等数据。这是无人艇协同“嘉庚”号首次完成海上科考分区协同实时作业,这种母子船队组网作业模式拓展了海上作业的时空尺度和机动性,能够大幅提高探测作业效率。
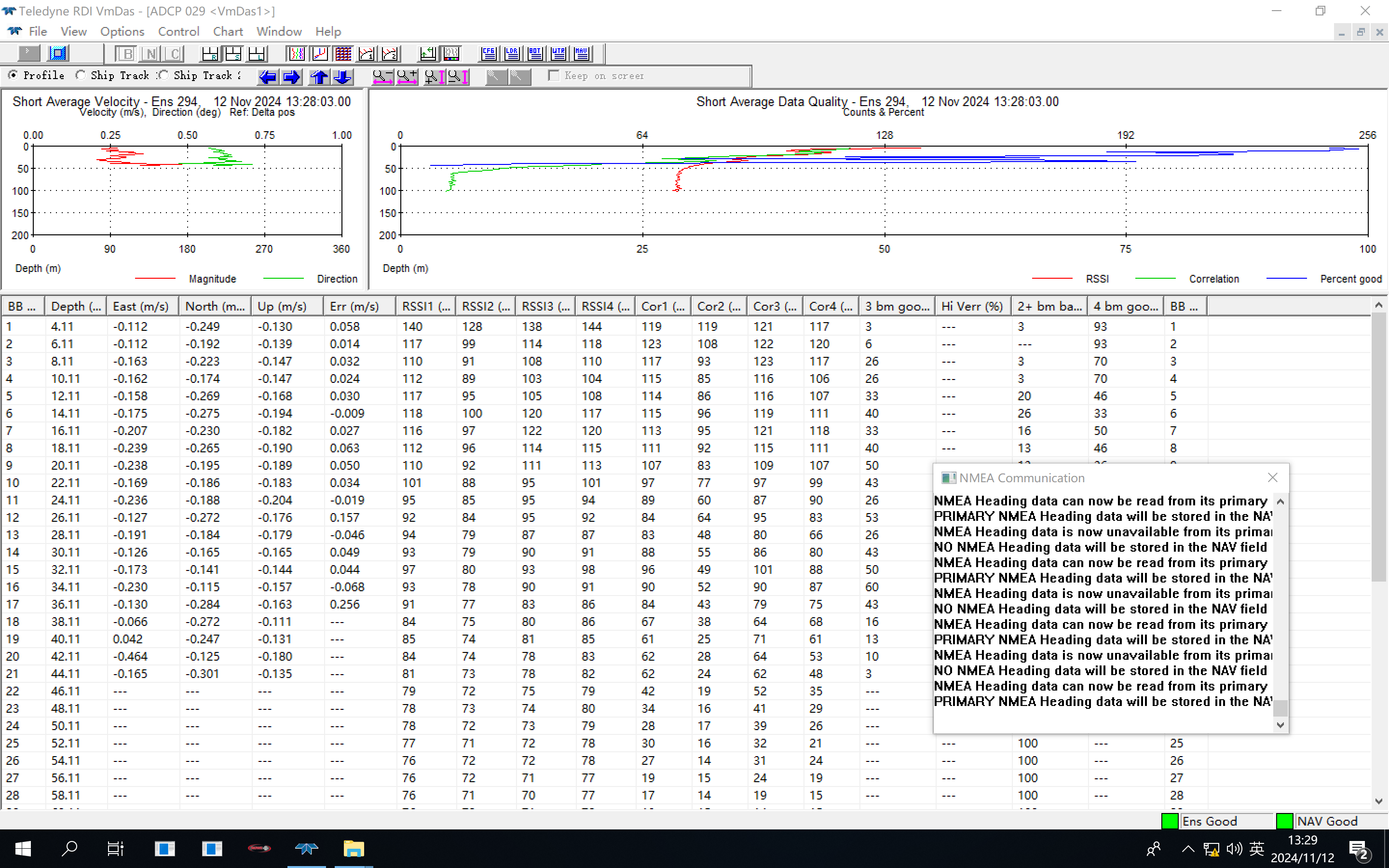
无人艇搭载的WHM600K型ADCP数据回传情况
亮点三:“哨鸽”系统助力母子船队协同作业
“哨鸽”系统是能实时监视海上作业现场的信息回传系统,充分利用海上多链路融合通信技术,实现了“嘉庚”号和无人艇的实时位置和现场视频信息的即时传输,是无人艇脱离母船独立作业实时“放哨的鸽子”,为无人艇与母船之间的协同作业提供了坚实的安全保障。
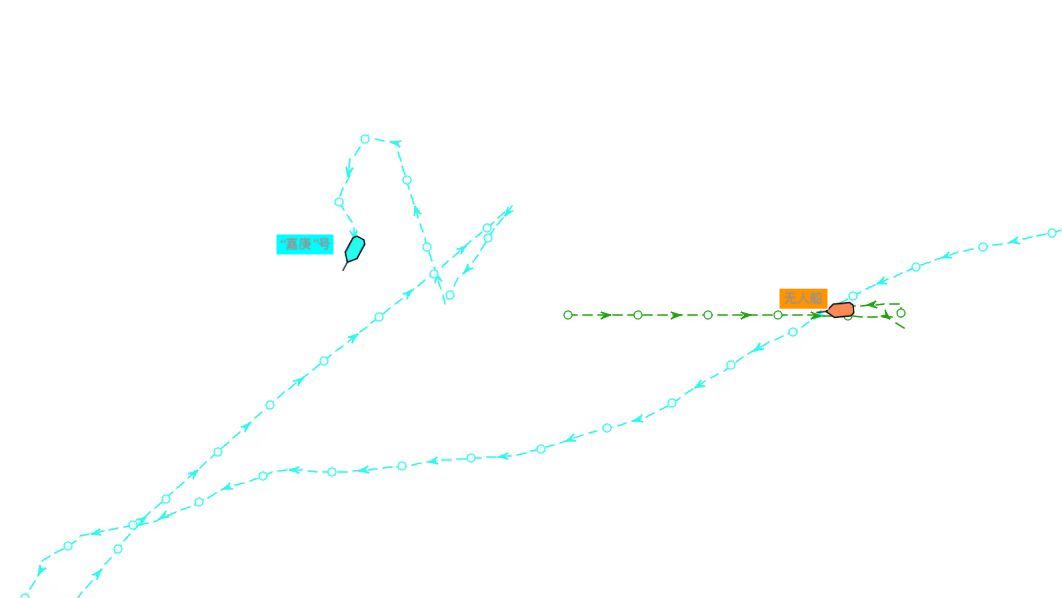
“哨鸽”系统实时显示“嘉庚”号(青色)和无人艇(黄色)的位置信息
未来,“嘉庚”号将持续提升母子船队协同组网作业效能,并进一步探索以“嘉庚”号为母船的下一代无人化科考船队的更多可能。
文稿:陈希荣、戴君伟、黄家骏、刘秋玲
排版:黄家骏
审核:厦门大学科考船运行管理中心
原文链接:https://mp.weixin.qq.com/s/IZg4tZEITh76PVkRYK3Itw




